相关证件:
会员类型:
会员年限:14年
王小姐 
电话:0755-23956352
手机:18898759426
郭小姐
电话:0755-23956352
手机:13590238639
特价供应 日本欧姆龙 F160-S2 视觉传感器 全新原装 现货
是指通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。
视觉传感器图像处理的基础
摄像机输出的图像信号
隔行扫描传输型摄像机的情况下,在传输1个画面时,图像信号将分开向偶数半帧和奇数半帧输出。将这2个半帧图像合并后便是全帧图像。
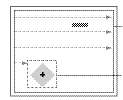
通过限定图像读入的纵方向范围,可缩短图像读入时间。这种功能在连接带局部扫描功能的摄像机(F160-S2、F500-S1、F210-S1)的情况下可进行设定。
设定范围时请考虑测量物的偏移量。
例:F160-S2为282线的情况
图像前处理
●图像前处理
将从摄像机读入的图像加工成便于测量的图像。通过反复进行前处理和组合不同种类的前处理,可以得到适于测量的图像。
前处理
作为对象的现象
前处理的内容
例
OFF
--
--
--
平滑化弱
测量物中有微小的斑点。
晕开后减弱斑点。
可稳定搜索
平滑化强
膨胀
白色测量物中有黑色干扰
加粗白色清除黑色干扰。
清除测量物的干扰
收缩
黑色测量物中有白色干扰
减小白色清除干扰。
清除测量物的干扰
中值
测量物中有微小的斑点。
保持轮廓并减弱斑点。
确定边缘位置
边缘强调
测量物模糊(照明变动等)
使图像明暗的分界线清晰
边缘定位
垂直边缘提取
由于图像对比度差,很难提取缺陷
提取图像纵向分界线(明暗)。
伤痕检查
水平边缘提取
由于图像对比度差,很难提取缺陷
提取图像横向分界线(明暗)。
伤痕检查
边缘提取
由于图像对比度差,很难提取缺陷
提取图像分界线(明暗)。
伤痕检查
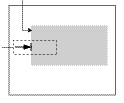
●背景剪切
剪切掉不需要的背景图像,不作为测量的对象。
请一边观察图像,一边对要剪切为背景的浓度的上限值和下限值进行设定。
低于下限值的图像将转换为浓度0,而高于上限值的图像则转换为浓度255,只有下限值~上限值的浓度图像会拉伸为0~255的浓淡度,成为测量对象。
例)设定为下限值:100 下限值:220
只有浓度值为100~220的图像会成为测量对象,拉伸为0~255的浓淡度。
位置修正
测量物的位置和方向不确定时,可计算出标准位置和当前位置的偏移量,修正后实施测量。配备有多种位置修正方法,请选择适合的方法。
2值化处理与浓淡处理
2值化处理:将从摄像机读入的256灰度的浓淡图像转换为白像素与黑像素(2值)后进行处理的方式。设置上限下限的阈值(2值化值),将其间浓淡度的浓淡图像转换成白色,除此之外转换为黑色。白像素为测量对象。
对从摄像机读入的256灰度的浓淡图像直接进行图像处理的方式。保持浓淡的模拟量部分与2值化处理相比,理论上能得到高精度的稳定结果。
由于视觉传感器对对象物的特征量进行测量,所以备有多个处理项目(算法)。以下将对其示例进行介绍。
从摄像机读入的图像就是256灰度的浓淡图像。用于该浓淡图像的测量方法。作为代表性的处理项目,包括浓度缺陷检查、模式检查、浓淡搜索、旋转搜索等。
将基础图像模式作为模型事先登录,从输入图像中搜索与模型为相似的部分。由于采用相关值来表示相似程度,所以可以对缺损和异种混入进行检查。此外,通过输出找到的模型位置(X,Y),也能用于定位等用途。
通过浓度变化搜索边缘。设定「搜索边缘方向」和「颜色变化」作为检测条件。
通过浓度的分散来检查是否有缺损和污渍。
前提条件是「背景均匀」。纹路和标志上的破损和污渍无法检测。
2值图像的测量处理
将从摄像机读入的256灰度的浓淡图像转换为白像素和黑像素2种,并仅关注白像素部分进行测量的方法。
设置上下限的阈值(2值化值),将其间灰度的浓淡图像转换成白色,除此之外转换为黑色。作为代表性的处理项目,包括2值缺损检查、标签处理。
对测量区域内的白像素部分的重心・面积・主轴角进行测量。
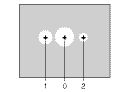
在2值图像的白像素块中,贴上「0、1、2…」的纸片(标签)的处理称为标签处理。
可对测量区域内的标签数进行计数,或求得指定标签的面积、重心位置。
将基础图像模式作为模型事先登录,从输入图像中搜索与模型为相似的部分。由于采用相关值来表示相似程度,
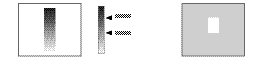
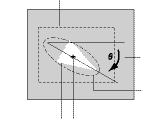
使用EC(边缘代码)提取圆形的示例
边缘代码表示边缘的方向(图中箭头)。
寻找圆的中心
寻找圆周上的边缘点
各边缘代码的左手90°方向为圆的中心。
能对圆形或直线形状的测量物的微小缺损和低对比度的伤痕等进行高精度检测。
橡胶垫等形状有弯曲的也能稳定地进行检查。
例) O型圈的缺损变化检查
通过「圆形」「有角」等形状上的信息来寻找定位标志。即使是变形或部分缺损的情况下,也能实现高精度的定位。
对比度低的图像也能进行定位。
从输入图像中搜索与要找的标志(模型)相似的部分,检测相关值(类似度)和位置。
即使是对比度低的图像和干扰多的图像,也能稳定地进行搜索。

 ●读入线数(局部扫描功能)
●读入线数(局部扫描功能)

(不降低精度)
(2值化处理使用)
(2值化处理使用)
(2值化处理使用)

(浓度值为100以下的图像不属于测量对象,全部转换为0)。


关于测量处理
![]()
浓淡图像的测量处理
●搜索
●边缘检测
●缺损污渍检测

●重心・面积・主轴角
●标签处理
所以可以对缺损和异种混入进行检查。
![]()

![]()

通过来自各边缘代码的投票来求得圆的中心,
因此即使不是完整的圆(即使有弯曲和缺损),
也都能找到中心。
●EC缺陷检查
●EC定位
●ECM搜索(边缘代码模型搜索)






 询价
询价